- · 《中国组织工程研究》栏[05/29]
- · 《中国组织工程研究》数[05/29]
- · 《中国组织工程研究》收[05/29]
- · 《中国组织工程研究》投[05/29]
- · 《中国组织工程研究》征[05/29]
- · 《中国组织工程研究》刊[05/29]
一、稿件要求: 1、稿件内容应该是与某一计算机类具体产品紧密相关的新闻评论、购买体验、性能详析等文章。要求稿件论点中立,论述详实,能够对读者的购买起到指导作用。文章体裁不限,字数不限。 2、稿件建议采用纯文本格式(*.txt)。如果是文本文件,请注明插图位置。插图应清晰可辨,可保存为*.jpg、*.gif格式。如使用word等编辑的文本,建议不要将图片直接嵌在word文件中,而将插图另存,并注明插图位置。 3、如果用电子邮件投稿,最好压缩后发送。 4、请使用中文的标点符号。例如句号为。而不是.。 5、来稿请注明作者署名(真实姓名、笔名)、详细地址、邮编、联系电话、E-mail地址等,以便联系。 6、我们保留对稿件的增删权。 7、我们对有一稿多投、剽窃或抄袭行为者,将保留追究由此引起的法律、经济责任的权利。 二、投稿方式: 1、 请使用电子邮件方式投递稿件。 2、 编译的稿件,请注明出处并附带原文。 3、 请按稿件内容投递到相关编辑信箱 三、稿件著作权: 1、 投稿人保证其向我方所投之作品是其本人或与他人合作创作之成果,或对所投作品拥有合法的著作权,无第三人对其作品提出可成立之权利主张。 2、 投稿人保证向我方所投之稿件,尚未在任何媒体上发表。 3、 投稿人保证其作品不含有违反宪法、法律及损害社会公共利益之内容。 4、 投稿人向我方所投之作品不得同时向第三方投送,即不允许一稿多投。若投稿人有违反该款约定的行为,则我方有权不向投稿人支付报酬。但我方在收到投稿人所投作品10日内未作出采用通知的除外。 5、 投稿人授予我方享有作品专有使用权的方式包括但不限于:通过网络向公众传播、复制、摘编、表演、播放、展览、发行、摄制电影、电视、录像制品、录制录音制品、制作数字化制品、改编、翻译、注释、编辑,以及出版、许可其他媒体、网站及单位转载、摘编、播放、录制、翻译、注释、编辑、改编、摄制。 6、 投稿人委托我方声明,未经我方许可,任何网站、媒体、组织不得转载、摘编其作品。
半自动脊柱手术机器人系统在脊柱外科治疗中的
作者:网站采编关键词:
摘要:摘要: 文题释义: 医学机器人: 是多学科研究和发展的成果,是指被应用在诊断、治疗、康复、护理和功能辅助等诸多医学领域的机器人,目前主要被分为手术机器人、康复机器人、
摘要:
文题释义:
医学机器人:是多学科研究和发展的成果,是指被应用在诊断、治疗、康复、护理和功能辅助等诸多医学领域的机器人,目前主要被分为手术机器人、康复机器人、辅助机器人、服务机器人。
自动化程度:可分为医师完全直接控制、医师机器人协同控制、医师监督下半自动及机器人全自动4个等级。医师监督下半自动即在医师监督下,手术机器人有一定的自主性执行手术任务,医师主要起到巡视监督的作用,在执行的过程中参与较少,例如肿瘤放射治疗的赛博刀系统。术中或术前医师负责手术规划,执行工作交付于手术机器人,医师在术中可调整手术计划,确保手术过程的安全执行。
背景:临床常用的手术机器人主要依赖进口,自动化程度不高,核心技术无法突破,国产机器人方兴未艾,手术机器人造价昂贵,手术费用居高不下。课题组及深圳鑫君特智能医疗器械有限公司协同开发了Orthobot脊柱外科专用手术机器人系统,对国产手术机器人的发展意义重大。
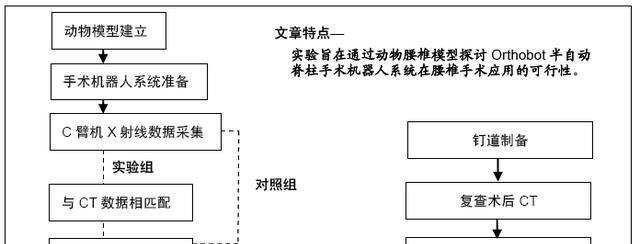
目的:通过动物腰椎模型探讨Orthobot半自动脊柱手术机器人系统在腰椎手术的应用可行性,验证其安全性及有效性,优化手术流程。
方法:将12具实验猪腰椎标本(L1-L6)随机分成2组,实验组(6具)采用术前CT扫描数据结合术中C臂机X射线透视进行配准,在三维CT数据下规划钉道,应用Orthobot机器人系统进行腰椎标本椎弓根定位,克氏针钻孔,沿克氏针攻丝,制备钉道;对照组(6具)直接采用术中C臂机X射线透视数据,在二维X射线数据下规划钉道。记录术中钉道规划时间、克氏针植入时间、射线暴露时间及机器人单个钉道制备总耗时。复查CT扫描,参照Abul-Kasimhierarchy分级系统评估植入椎弓根螺钉钉道的准确性与优良率。
结果与结论:①实验组钉道规划时间、单个钉道制备总耗时长于对照组(P < 0.001),两组射线暴露时间、克氏针植入时间比较无显著性意义(P > 0.05);②复查CT评估显示,实验组制备60个腰椎椎弓根螺钉钉道的优良率为96.7%(58/60),明显优于对照组的优良率85.0%(51/60)(P < 0.05);③结果表明对比单纯采用术中C臂,应用半自动Orthobot脊柱手术机器人系统结合术前CT与术中C臂置钉的准确率高、安全有效,但术中系统注册匹配时间增加、手术总耗时更长。
ORCID: 0000-0002-6549-7973(林云志)
中国组织工程研究杂志出版内容重点:人工关节;骨植入物;脊柱;骨折;内固定;数字化骨科;组织工程
关键词: 骨科, 脊柱, 半自动化, 机器人, 手术机器人, 椎弓根螺钉, 微创外科, 动物实验
文章来源: 林云志, 方国芳, 李修往, 吴家昌, 吴铭杰, 谭 亮, 赖国华, 叶灼烽, 桑宏勋. 半自动脊柱手术机器人系统在脊柱外科治疗中的应用[J]. 中国组织工程研究, 2020, 24(24): 3792-3796.
文章来源:《中国组织工程研究》 网址: http://www.zgzzgcyj.cn/zonghexinwen/2020/0814/520.html